Inderdaad de deadline heb ik niet gehaald!
Voor deze winter had ik grofweg in de planning staan:
Hardware:
1: Afstandsbediening - Remote Control
2: Onderdekse drive - MotorController Advanced
3: Zonnekapje
Software:
4: "preset gains"
5: Beter ingericht Menu op de ControlHead
6: Beter gestructureerd en mooiere webinterface.
Marketing:
7: Internationale webshop pcnautic.com
Het liep allemaal wat anders, eerst moest het team beter remote kunnen samenwerken dus de gitserver op de schop dat was al een flinke klus, nu kan iedereen op zijn pc zijn aanpassing direct uitvoeren om te kijken of het werkt, dan pushen naar git en met 1 druk op de knop hebben we de update build van de branche en dan kan iedereen het meteen testen.
Toen kwam daar ineens de pi zero 2, dat is een mooie ontwikkeling en precies op tijd.....
Ik was namelijk bezig met het opstarten van een traject voor CE en de zero 2 is goedgekeurd als module dus dat scheelt enorm! Daarnaast is hij een stuk sneller, op zich niet nodig maar je merkt het wel in de webinterface. Maar......
Pypilot draaide op Tinycore 9 en voor de zero 2 moesten we naar Tinycore 13, in eerste instantie geen probleem we hadden geen haast.
Toen kwamen de tekorten op de wereldmarkt, ik moest vol aan de bak om productie onderdelen veilig te stellen en toen bleek dat ik nog maar beperkt aan de oude pi zero kon komen, dus we moesten over naar de zero 2 z.s.m.

Dat bleek voor mijn team lastiger dan verwacht en uiteindelijk heb ik er een Senior developer bij moeten halen en die heeft het gefikst.
Wij hebben nu Pypilot draaien op TC13 en sinds deze week leveren we hem ook uit met de pi zero 2, dat heeft Sean nog niet eens voor elkaar.
Maar goed dat stond dus niet in de planning.
1: Remote Control
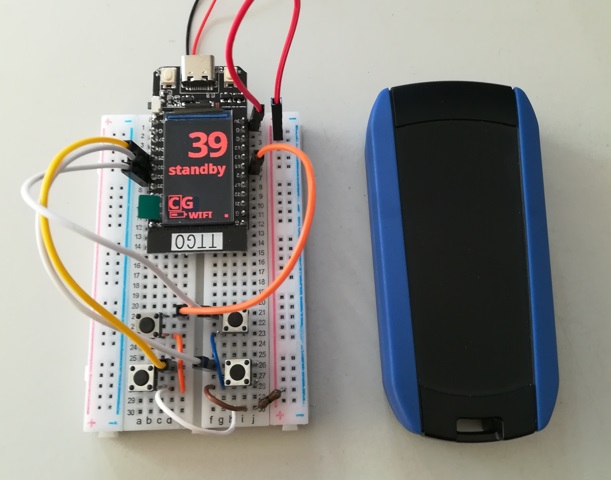
Daar waren heel veel mogelijkheden radio, bluetooth, wifi, Loran? dus een keuze maken was lastig, uiteindelijk bleek op basis van ESP32 over wifi best een mooie opzet, daar was al code voor in Pypilot dus makkie.... helaas bleek dat ook nogal een klus maar we hebben het werkend gekregen!
Nu is het echt een kopie van de Controlhead we gebruiken een Lilygo TTGO en dan 4 knoppen dus het werkt net als de ControlHead en je hebt de zelfde weergave op het display, de bedoeling is icm lipo 1200ma accu en QI draadloos laden. ik wacht nu nog op de accu's en laders een mooi doosje heb ik al, dan kijken hoe ik het er in krijg zodat ik de folie kan laten maken.
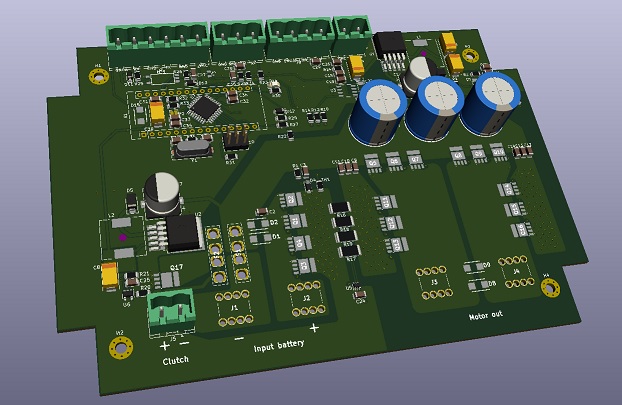
2: MotorController Advanced
Voor de onderdekse drives wil ik een MotorController die op zo goed als elke motor kan worden aangesloten dus daarom de uitvoering Advanced.
Tijdens het ontwerp van het prototype moesten we steeds dingen aanpassen omdat onderdelen binnen enkele dagen ineens niet meer leverbaar waren (kennelijk werd alles opgekocht) Hierdoor slopen er foutjes in zodat de proto uiteindelijk niet goed te testen bleek, vervolgens zijn we gaan aanpassen maar we lopen gigantisch tegen de leverbaarheid van de gewenste onderdelen aan, door andere prioriteiten ligt het nu 2 weken al stil omdat Daan nu geen tijd heeft en langzaam een en ander weer beter leverbaar lijkt te worden, maandag gaan we weer een nieuwe planning maken.
3: Zonnekapje
Kwam er maar niet aan toe stof?, zeil?, 3d printen?, silicone gieten?, Dompelen? Dat rubber achtige van Raymarine stond me wel aan, dat effect kun je krijgen met 2 componenten silicone gieten, mal laten printen etc, Ik had wel connecties die daar mee konden experimenteren dus daar neergelegd maar dat schiet niet echt op. Dus toen ook maar een offerte aangevraagd voor pvc dompelen die is doorgesproken en wordt nu uitgewerkt maar ik weet nog niet of dat haalbaar/betaalbaar is.
4: Preset gains
Ja goed nieuws!!!! Dit werkt helemaal!
Je kan nu de gains settings een naam geven en opslaan, hierdoor kunnen wij
ook verschillende settings voorprogrammeren voor verschillende type schepen.
De setting kun je kiezen op de ControlHead en in de webinterface.
De huidige gebruikers kunnen een update vragen als ze dit nu al willen, ik verwacht binnenkort officieel een update uit te brengen maar daar zou ik dan graag ook punt 5 en 6 in willen hebben.
5: Beter ingericht Menu op de ControlHead
Dit stelt niet zoveel voor is meer afhankelijk van de beslissingen in punt 6 zodat overall er een duidelijke logische structuur ontstaat zodat je niet hoeft te zoeken naar functies.
6: Beter gestructureerd en mooiere webinterface.
Je oog wil ook wat en het moet gewoon voor iedereen meteen duidelijk zijn waar je wat kunt vinden, ook info en linkjes naar de manual die dan offline beschikbaar is in de webinterface is de wens, daar wordt nu aan gewerkt ik verwacht volgende week de eerste screenshots met voorstellen.
Ook hier moest eerst de "database" aangepast worden zodat we dit voor de toekomst veel makkelijker kunnen aanpassen.
7:Internationale webshop
pcnautic.com/
De basis draait maar er moet nog heel veel gebeuren, features die we nu hebben:
Multilanguage, prijzen in EU in Euro's buiten EU in Dollars, BTW aangepast per land, directe koppeling met boekhoudsoftware, betaalopties per regio, betaalkosten en verzendkosten per regio, etc, etc,
Op dit moment zijn de helft van mijn klanten voor de Autopilot al buiten NL, nog via de oude site dus dat is nog veel handmatig werk.
Dus eigenlijk moet de webshop nu mijn hoogste prioriteit krijgen.
Hieronder sneak previews:
Remote Control test met het gewenste doosje er naast:
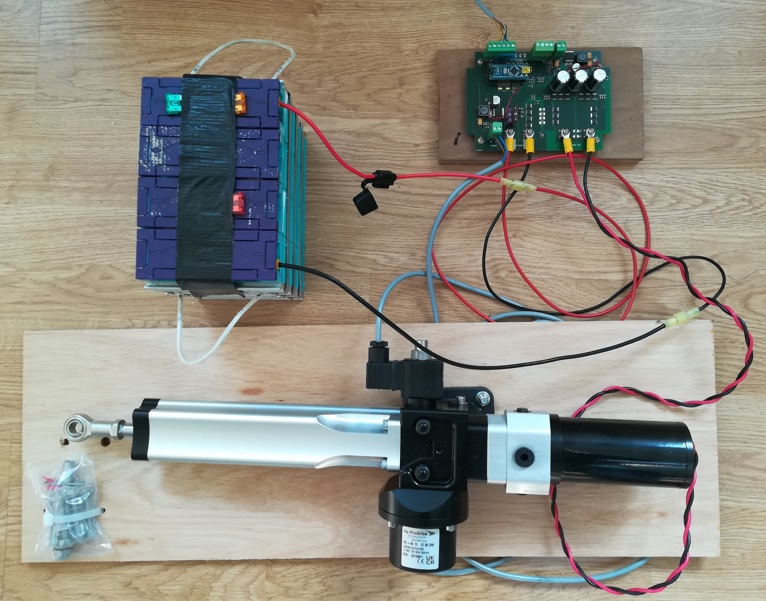
Test setup van de MotorController Advanced met Hypro compact drive: